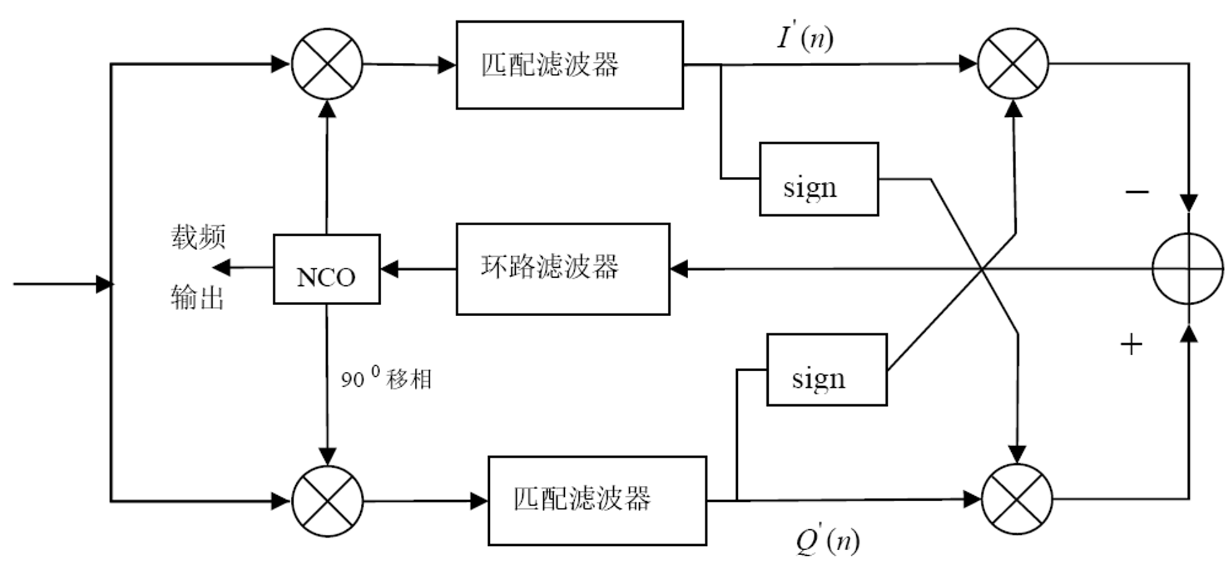
直接恢复法
常用的方法是 Costas 环,原理框图如下:

假设 NCO 输出的正交载波信号为:
_θ_ 为解调端 NCO
输出的载波信号与调制端载波信号之间的相位差值,通常很小 已调信号 _m_(_t_)_cos_(_ωct_+_θ_)
分别与 _y_1, _y_2
相乘后可得:
低通滤波后可得:
将其相乘后得到误差信号:
_y_7通过环路滤波后控制 NCO 的相位控制字和频率控制字,最终使得 NCO
输出的载波信号和调制信号的载波频差减小到较小的值 NCO 的输出 _y_1 = cos (_ωct_+_θ_)
即是恢复的解调载波
环路滤波器
Loop Filter 的主要作用:
将鉴频器输出的高频误差信号进行滤除,提供频率控制字误差补偿

相位追踪模块的系数_C_1
控制环路滤波器输出的相位性能,频率追踪模块的系数_C_2
控制环路滤波器输出的频率性能,理论计算公式为:
_δ_表示环路滤波器的系统阻尼系数,通常等于 0.707
_ωn_表示环路滤波器系统振荡角频率,计算公式为:
_B_表示环路滤波器的噪声带宽,通常为码元速率的 1/10 或 1/100
其值越大,环路的频率捕捉范围也就越大,进入锁定状态的速度越快,产生噪声越多,受
噪声影响也越大,因此环路输出的频率与相位抖动也随之增大
_T_ 表示 NCO的频率控制字更新时间周期
_Kd_是环路增益,与鉴频器增益 _Kp_ 和 NCO 增益_K_0 有关,_Kp_ 一般取0.03,_K_0 取:
环路滤波器的设计最重要的是环路带宽的选取
NCO
假设频率控制字为 S,则
N为累加器位数
改进型 Costas
其中I/Q两路的低通滤波器的通带范围是:$\frac{2\times f_c}{10}$
环路滤波器的通带范围是:$\frac{f_c}{10}$
VCO Input Sensetivity: $\frac{f_c}{10}$
- 本文作者: Moerjie
- 本文链接: https://moerjie.github.io/751c56df8069/
- 版权声明: 本博客所有文章除特别声明外,均采用 MIT 许可协议。转载请注明出处!